5.1 Koordinatensystem und Maßangaben
Kapitelnavigation
zurück zum Vorwort/Inhaltsverzeichnis
5 Block Mechanische und elektrische Konstruktion
5.1 Koordinatensystem und Maßangaben
Dieser Artikel in anderen Sprachen
-
Deutsch
-
English
Allgemeine Regeln für Maßangaben und Richtungen
Für die physikalische Beschreibung von Geräten und den damit verbunden unterschiedlichen Angaben von Positionen und Richtungen, sind die folgenden Angaben Basis für alle Beschreibungen. Die Maßangaben erfolgen in der Regel in mm.
Produktkoordinatensystem
Die Orientierung von Punkten, Richtungen und Bezüge werden in einem Produktkoordinatensystem realisiert.
Das Koordinatensystem bildet ein eigenständiges Produktkoordinatensystem und ist unabhängig von der tatsächlichen Platzierung des Produktes im Anwendungsraum. Alle Koordinatenangaben zu einem Produkt beziehen sich auf den Nullpunkt bzw. auf die Ausrichtung dieses Produktkoordinatensystems.
Produktabmessungen Hüllkörper Quader

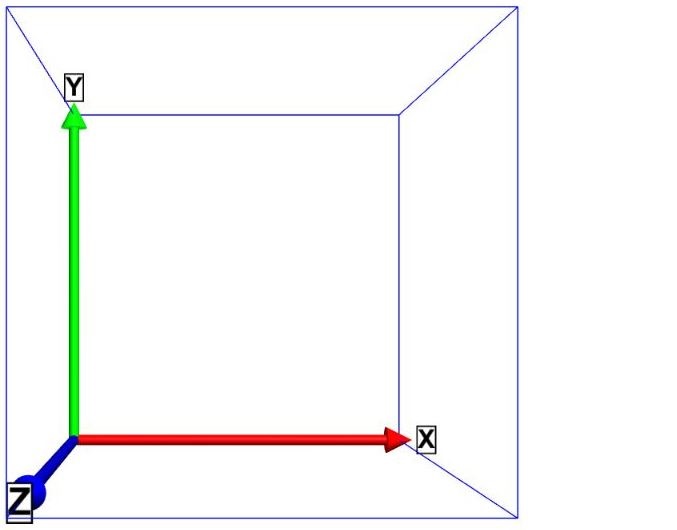
Die Standardmontageebene platziert auf die X/Y-Ebene, wobei die X-Richtung die Richtung der Aneinanderreihung ist. X-Richtung ist dabei nach rechts (horizontal), Y- Richtung ist nach oben (vertikal) und Z-Richtung ist auf den die X/Y- Ebene betrachtenden Anwender zukommende Achse.
Zur Beschreibung der für die CAx-Anwendung erforderlichen Abmessungen und Koordinaten von Betriebsmitteln liegen zwei Körperformen zu Grunde:
- Hüllkörper Quader
- Hüllkörper Zylinder
Produktkoordinatensystem bei Hüllkörper Quader

Bei einem Hüllkörper vom Typ Quader ist der Bezugspunkt (RP) der äußerste, linke, untere, hinterste Punkt des Hüllkörpers. Alle Positionen haben damit in der Regel in alle Richtungen die Ausprägungen größer/gleich Null.
Produktkoordinatensystem bei Hüllkörper Zylinder
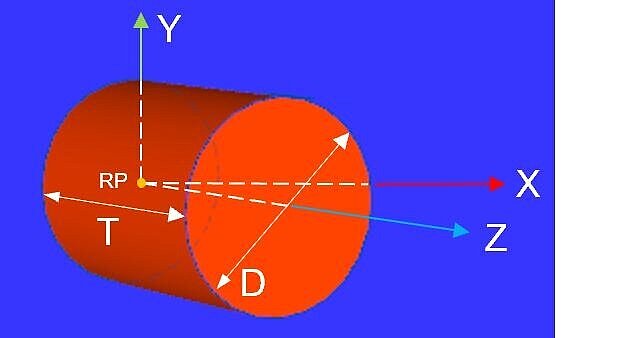
Bei einem Hüllkörper vom Typ Zylinder ist der Bezugspunkt (RP) der mittlere, hinterste Punkt des Hüllkörpers. Die Bezüge für X- & Y-Richtung befinden sich damit in der Symetrieachse und können sowohl positive wie negative Ausprägungen beinhalten. Die Z-Achse von Positionen beinhaltet wie beim Hüllkörper Quader in der Regel nur Ausprägungen größer/gleich Null.
Richtungsangaben
Gemäß den Hauptrichtungen des Produktkoordinatensystems sind auch die Richtungsangaben oben, unten, links, rechts, vorne und hinten definiert.
X=Breite | Y=Höhe | Z=Tiefe |
 |  |  |
Bild 14: Aus dem Produktkoordinatensystem abgeleitete Richtungsangaben
Alle Maße, Anschlusspunkte und 3D-Modelle werden stets für den eingebauten Zustand im Normalbetriebsfall angegeben.
Beschreibung von Koordinaten mit ECLASS AXIS 1D
In ECLASS werden Koordinaten mit dem Datentyp AXIS 1D angegeben.
Dieser Datentyp beschreibt zwei Vektoren mit jeweils X-, Y- und Z-Werten. Dabei beschreibt der erste Vektor eine Koordinate im Produktkoordinatensystem und der zweite Vektor eine Richtung mit Hilfe von Einheitsvektoren. Die Werte werden ohne Einheit übertragen
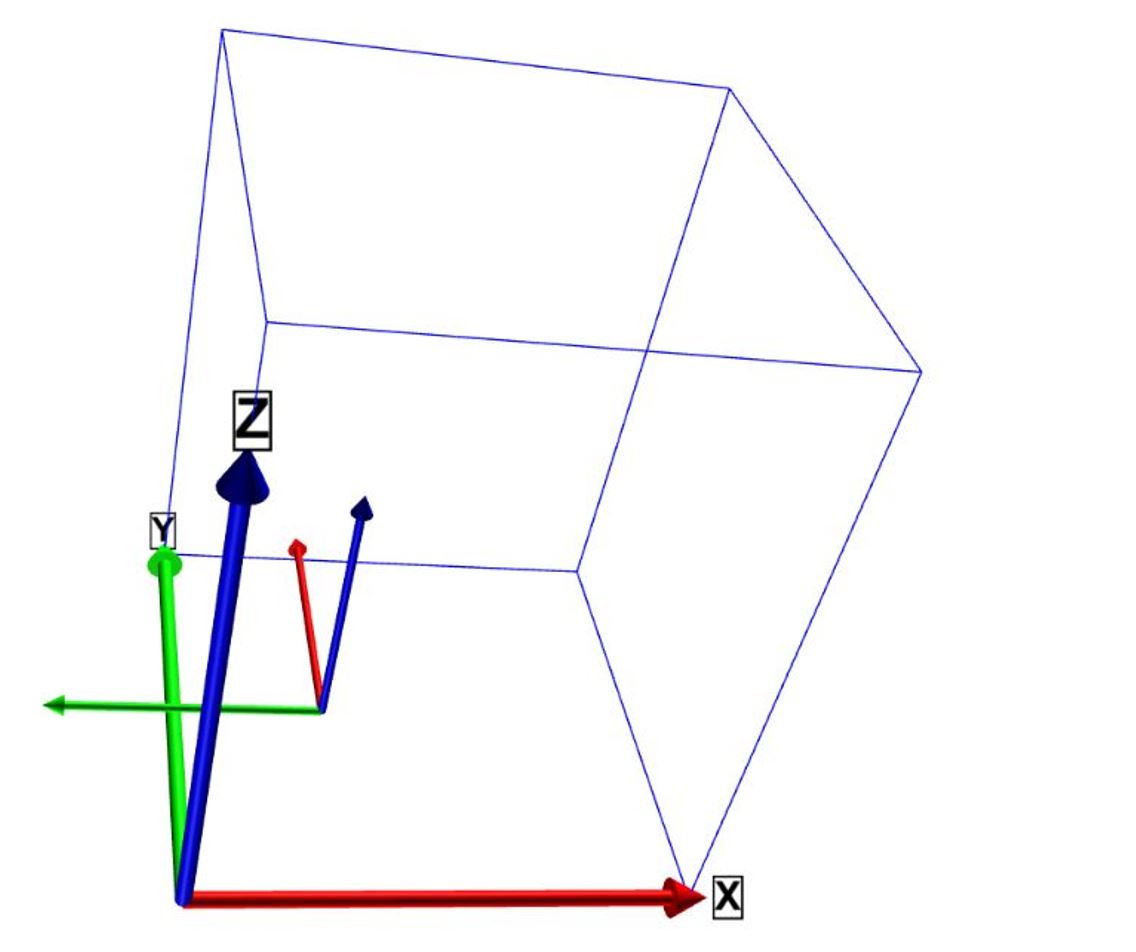
Es kann aber mit dem Datentyp AXIS 1D auch ein weiteres Koordinatensystem beschrieben werden. Dabei geben die ersten drei Werte die Verschiebung des Koordinatensystems an und die anderen drei Werte geben an, um wieviel Grad die Achsen des neuen Koordinatensystems bezogen auf das Referenzsystem gedreht wurden.
Zur Beschreibung von zusätzlichen Koordinatensystemen wird neben der Information, um wieviel das Koordinatensystem zum Referenzkoordinatensystem verschoben ist auch die Information benötigt, wie die dessen Achsen gedreht wurden. Die Rotation der einzelnen Achsen erfolgt dann mit der Angabe in Grad („°“). Diese Zusätzlichen Koordinatensysteme bezeichnen wir als „Anker“ und unterscheiden hier zwei Typen, den Zielanker, dieser Beschreibt wo eine andere Komponente am Gerät platziert werden kann und den Grundanker, dieser beschreibt das Gegenstück an der Komponente die platziert werden soll.
Beispiele für die Nutzung des AXIS 1D im ECLASS Modell

Die Beschreibung für einen Koordinate und die Angabe der Richtung ist z.B. zur Beschreibung von Drahtanschlüssen erforderlich. Die gelben Pfeile geben an, an welcher Position der Leiter in die Klemme eingeführt werden kann , aus welcher Richtung er eingeführt werden muss und wie weit er in den Klemmenschacht eingeführt werden kann.

Im Datenaustauschformat BMEcat werden die sechs Werte einzeln übertragen:
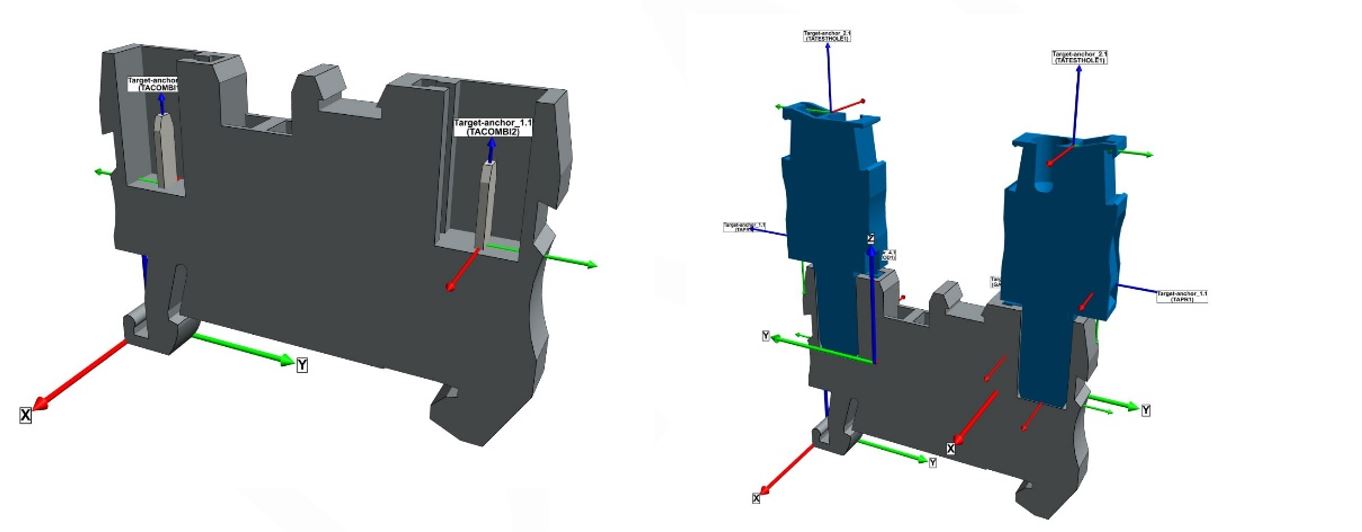
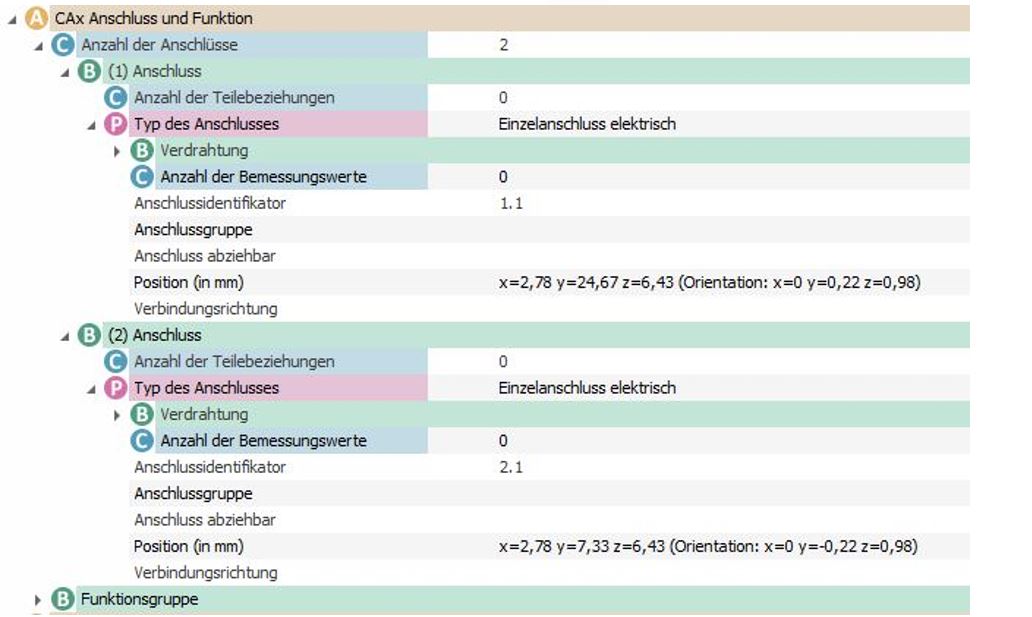
Für die Beschreibung einer Komponentenaufnahme müssen die Angaben die am Gerät erfolgen, mit den Angaben der Komponente zusammenpassen, die dort platziert werden kann. In diesem Beispiel können in die Klemme zwei Stecker platziert werden, wobei ein Stecker dann um 180° gedreht werden muss, damit er richtig ausgerichtet ist.
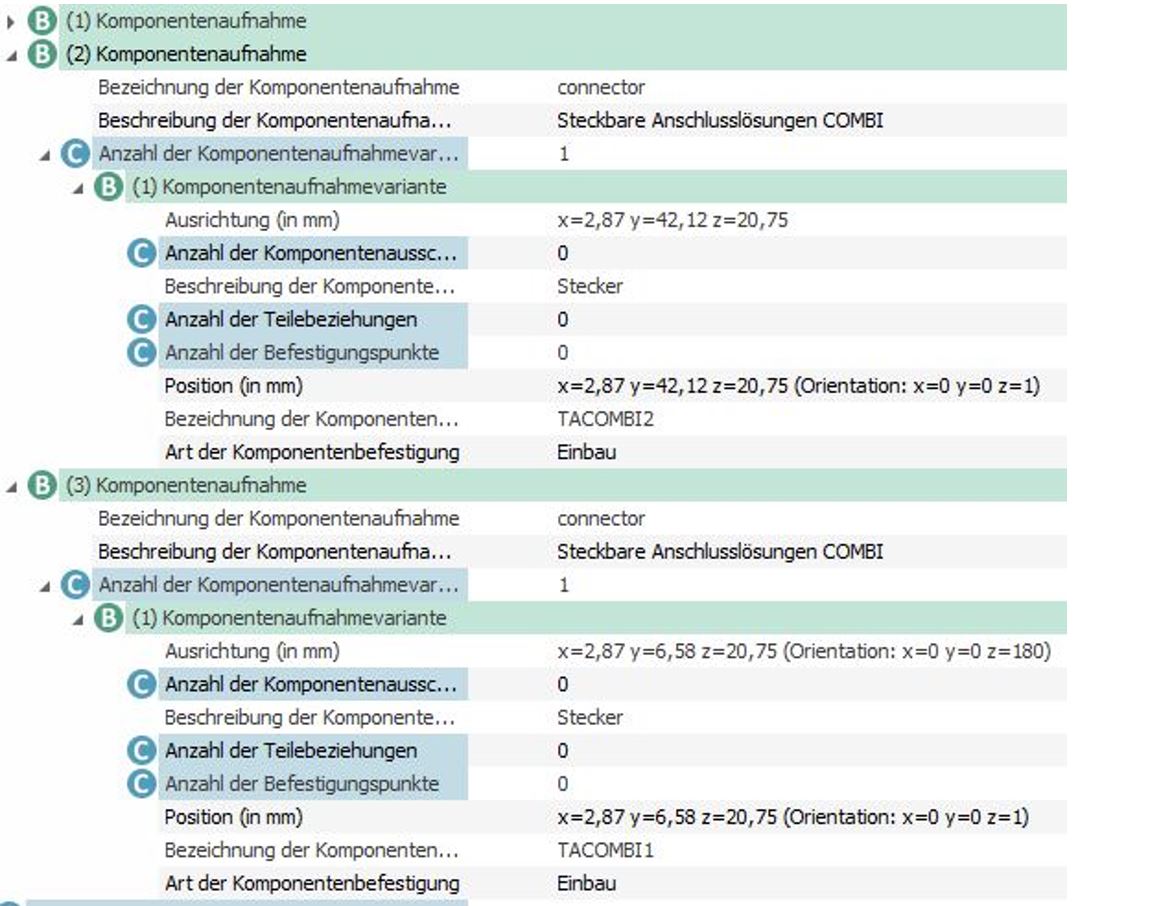
Um den Stecker richtig zu platzieren wird neben den Koordinaten wo der Stecker platziert werden kann, ist zusätzlich auch die Information erforderlich wie er, abhängig vom Einbauort, ausgerichtet werden muss. Dazu werden an der Klemme zwei Komponentenaufnahmen beschrieben. In dem Merkmal Ausrichtung im Bild sind die Daten abgebildet. Bei der ersten Komponentenaufnahme ist das Koordinatensystem (Zielanker) so ausgerichtet wie das Referenzkoordinatensystem, daher sind die Werte für die Rotation der Achsen 0. Bei der zweiten Komponentenaufnahme ist angegeben das Koordinatensystem (Zielanker) um 180° bezogen auf die Z-Achse gedreht ist. Zur Platzierung des Steckers auf der Klemme müssen der Befestigungsbezugspunkt und der Zielanker aufeinander gelegt werden und anschließend wird dann das Koordinatensystem des Steckers in die Richtung gedreht.
Zur Platzierung des Steckers auf der Klemme müssen der Befestigungsbezugspunkt und der Zielanker aufeinander gelegt werden und anschließend wird dann das Koordinatensystem des Steckers in die Richtung gedreht.

Im Block Komponentenaufnahmevariante sind die beiden Merkmale „Ausrichtung-AAN501“ und „Position-AAM650“ enthalten. Damit die Daten in den unterschiedlichen System genutzt werden können gilt die folgende Regel: Mit dem Merkmal „Position-AAM650“ wird der Punkt und die Richtung (Einheitsvektor) beschrieben. Damit können die Komponenten richtig platziert werden. Mit dem Merkmal „Ausrichtung-AAN501“ wird der Punkt und die Rotation des Zielankers beschrieben.
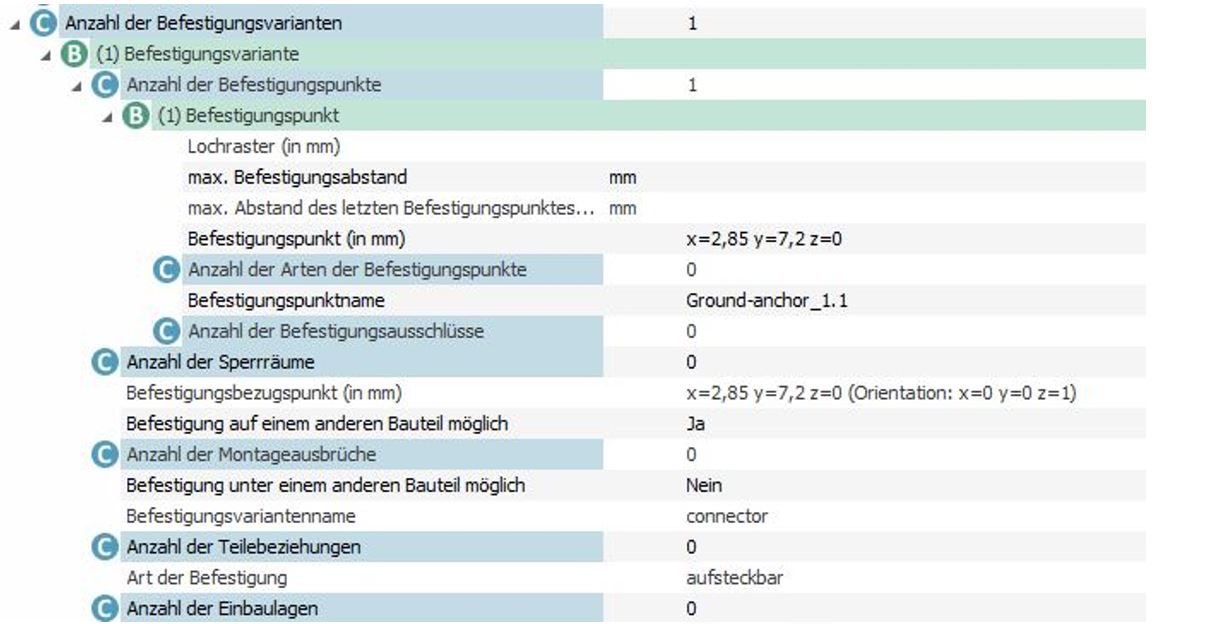
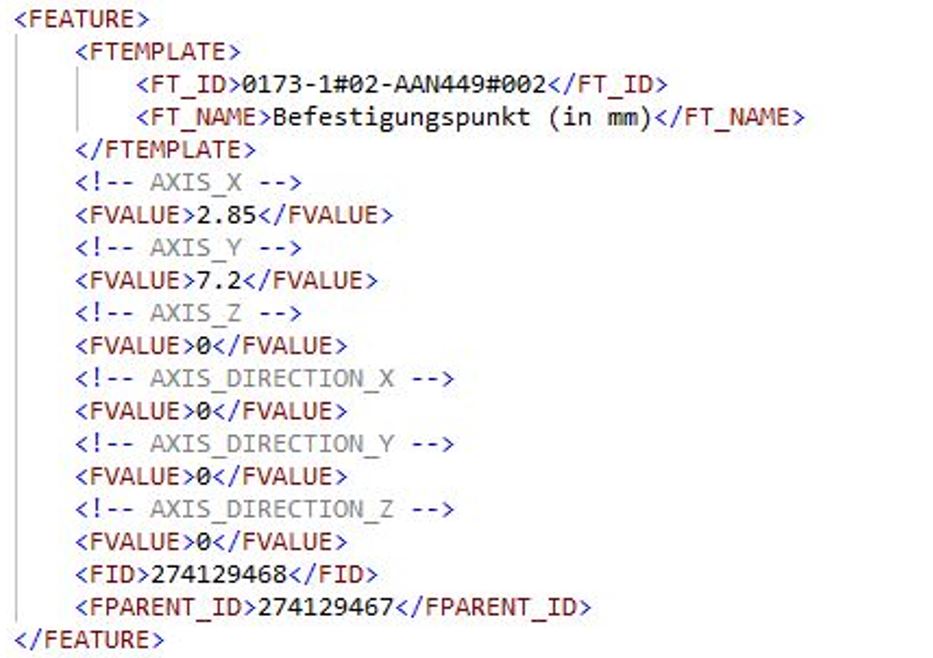
Entsprechend der Beschreibung einer Komponentenaufnahme erfolgt die Beschreibung der Befestigungsvariante an der Komponente. Im Merkmal Befestigungsbezugspunkt wird die Koordinate und die Richtung (Einheitsvektor) beschrieben. Sind Angaben des Grundankers verfügbar, werden diese mit dem Merkmal Befestigungspunkt beschrieben. Da in diesem Beispiel der Grundanker des Steckers so ausgerichtet ist, wie sein Referenzkoordinatensystem, sind die Rotationsangaben der Achsen „0“. Somit können die Zielsysteme die Information entsprechende abfragen und nutzen.