5.1 Système de coordonnées et dimensions
Navigation par chapitre
retour à l'avant-propos/Table des matières
5 Bloc Construction mécanique et électrique
5.1 Système de coordonnées et dimensions
Cet article dans d'autres langues
-
English
-
Français
Règles générales pour les dimensions et les directions
Pour la description physique des appareils et les différentes informations associées de positions et de directions, les informations suivantes constituent la base de toutes les descriptions. Les dimensions sont exprimées en millimètres.
Système de coordonnées du produit
L'orientation des points, des directions et des références est réalisée dans un système de coordonnées du produit.
Le système de coordonnées forme un système de coordonnées de produit indépendant et est indépendant du placement réel du produit dans la salle d'application. Toutes les données de coordonnées d'un produit se réfèrent au point zéro ou à l'orientation de ce système de coordonnées de produit.
Dimensions du produit Enveloppe cubique

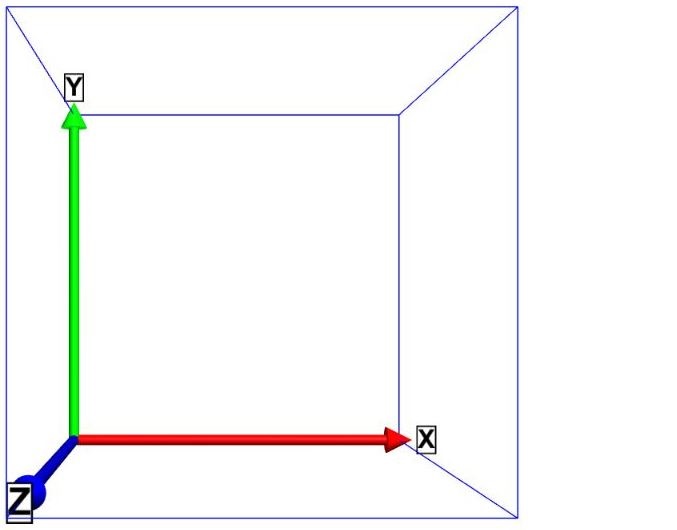
Le plan de montage par défaut est placé sur le plan X / Y, où la direction X est la direction de la séquence. La direction X est vers la droite (horizontale), la direction Y est vers le haut (verticale) et la direction Z est vers l'axe en regardant l'utilisateur du plan X / Y.
La description des dimensions et coordonnées de l’équipement pour l’application CAx se base sur deux formes de corps :
- Enveloppe cubique
- Enveloppe cylindrique
Système de coordonnées du produit pour l’enveloppe cubique

Dans une enveloppe de type cubique, le point de référence (RP) est le point le plus à l'extérieur, à gauche, le plus bas et le plus en arrière de l'enveloppe. En règle générale, tous les points ont des valeurs supérieures ou égales à zéro dans toutes les directions.
Système de coordonnées du produit pour l’enveloppe cylindrique
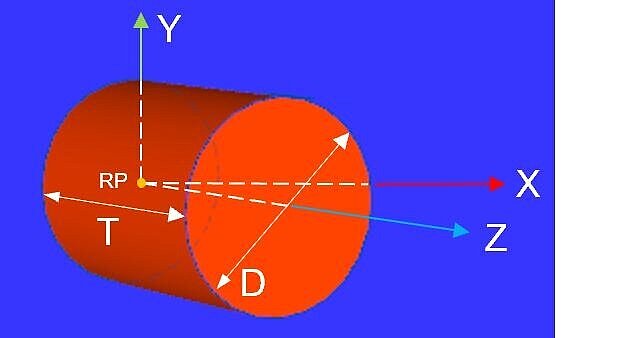
Dans un corps enveloppant cylindrique, le point de référence (RP) est le point médian le plus en arrière du corps enveloppant. Les références des directions X et Y sont donc dans l'axe de symétrie et peuvent contenir à la fois des valeurs positives et négatives. L'axe Z des positions ne contient généralement que des valeurs égales ou supérieures à zéro.
Informations directionnelles
Selon les principales directions du système de coordonnées du produit, les directions haut, bas, gauche, droite, avant et arrière sont également définies.
X=Largeur | Y=Hauteur | Z=Profondeur |
 |  |  |
Image 14: Directions émanant du système de coordonnées du produit
Toutes les dimensions, les points de raccordement et les modèles 3D sont toujours donnés pour l'état installé en fonctionnement normal.
Description des coordonnées avec ECLASS AXIS 1D
Dans ECLASS, les coordonnées sont spécifiées avec le type de données AXIS 1D. Ce type de données décrit deux vecteurs, chacun avec des valeurs X, Y et Z. Dans ce cas, le premier vecteur décrit une coordonnée dans le système de coordonnées du produit et le deuxième vecteur décrit une direction à l'aide de vecteurs unitaires. Les valeurs sont transmises sans unité.
Cependant, avec le type de données AXIS 1D, un autre système de coordonnées peut également être décrit. Les trois premières valeurs indiquent le décalage du système de coordonnées et les trois autres valeurs indiquent le nombre de degrés de rotation des axes du nouveau système de coordonnées par rapport au système de référence.
Pour la description des systèmes de coordonnées supplémentaires, en plus des informations sur le déplacement du système de coordonnées vers le système de coordonnées de référence, des informations sur la rotation des axes sont requises. La rotation des différents axes a alors lieu avec l'indication en degrés (« ° » ). Ces systèmes de coordonnées supplémentaires sont appelés "ancres" et nous distinguons ici deux types, l'ancre cible, qui décrit où un autre composant peut être placé sur l'appareil et l'ancre de base, cela décrit la contrepartie du composant à placer.
Exemples d'utilisation de l'AXIS 1D dans le modèle ECLASS

La description d'une coordonnée et l'indication de la direction sont par ex. nécessaire pour décrire les connexions des fils. Les flèches jaunes indiquent à quelle position le conducteur peut être inséré dans la borne, dans quelle direction il doit être inséré et dans quelle mesure il peut être inséré dans la fente de borne
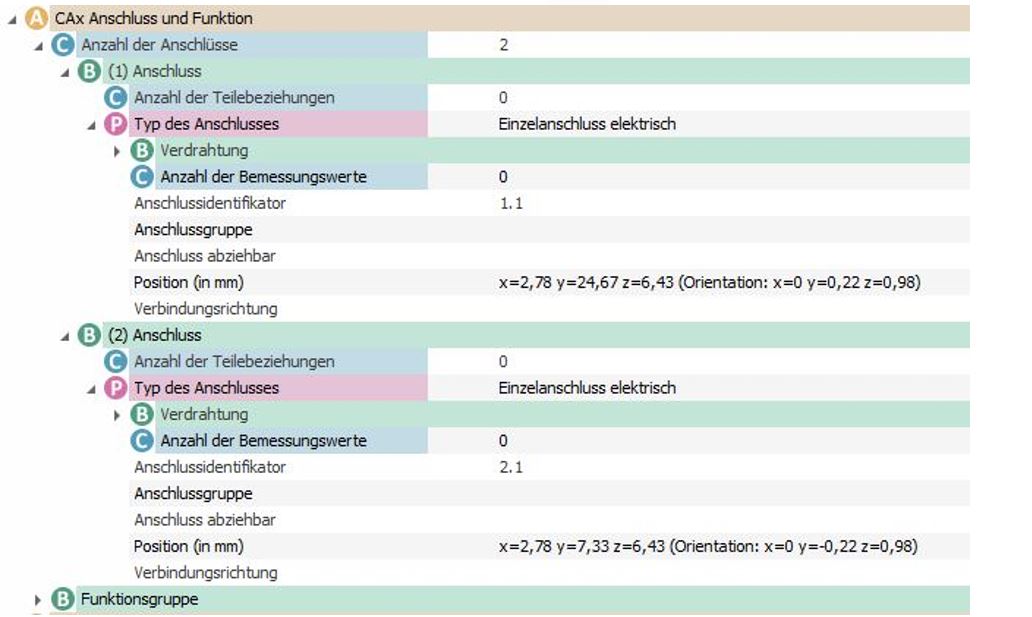

Dans le format d'échange de données BMEcat, les six valeurs sont transmises individuellement
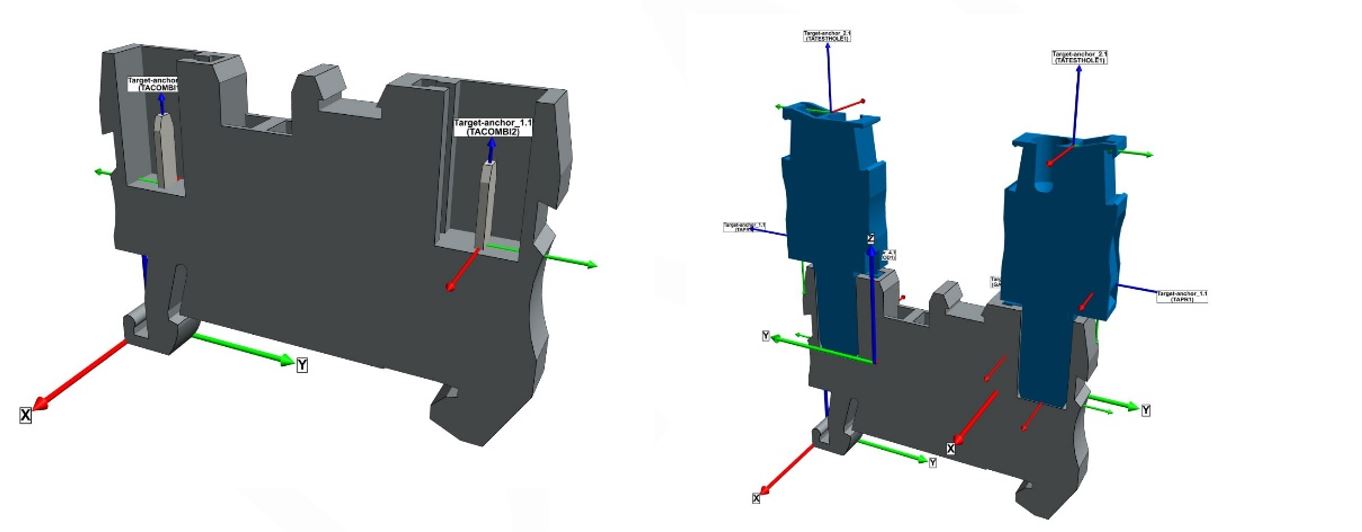
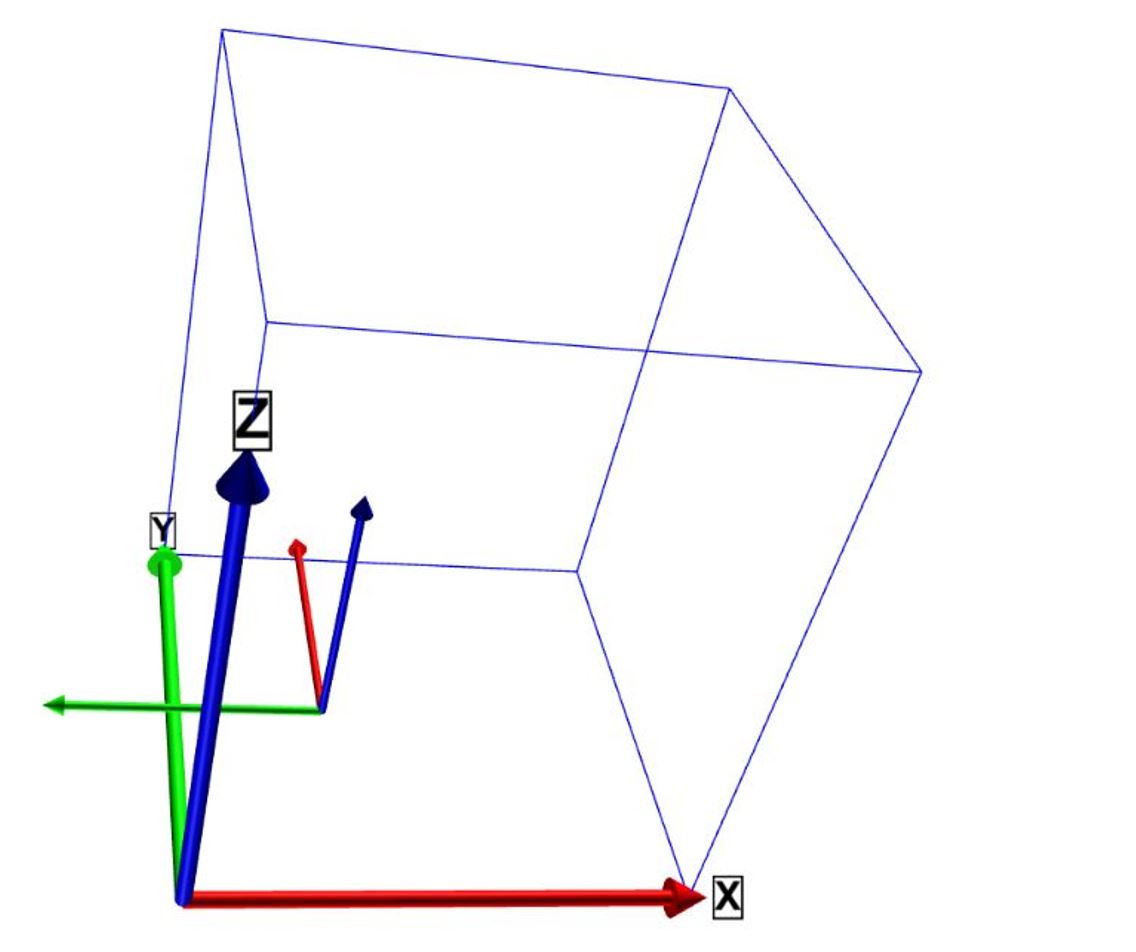
Pour la description d'un enregistrement de composant, les informations données sur l'appareil doivent correspondre aux informations du composant qui peut y être placé. Dans cet exemple, deux bouchons peuvent être placés dans la pince, puis un bouchon doit être tourné de 180 ° pour être correctement aligné.
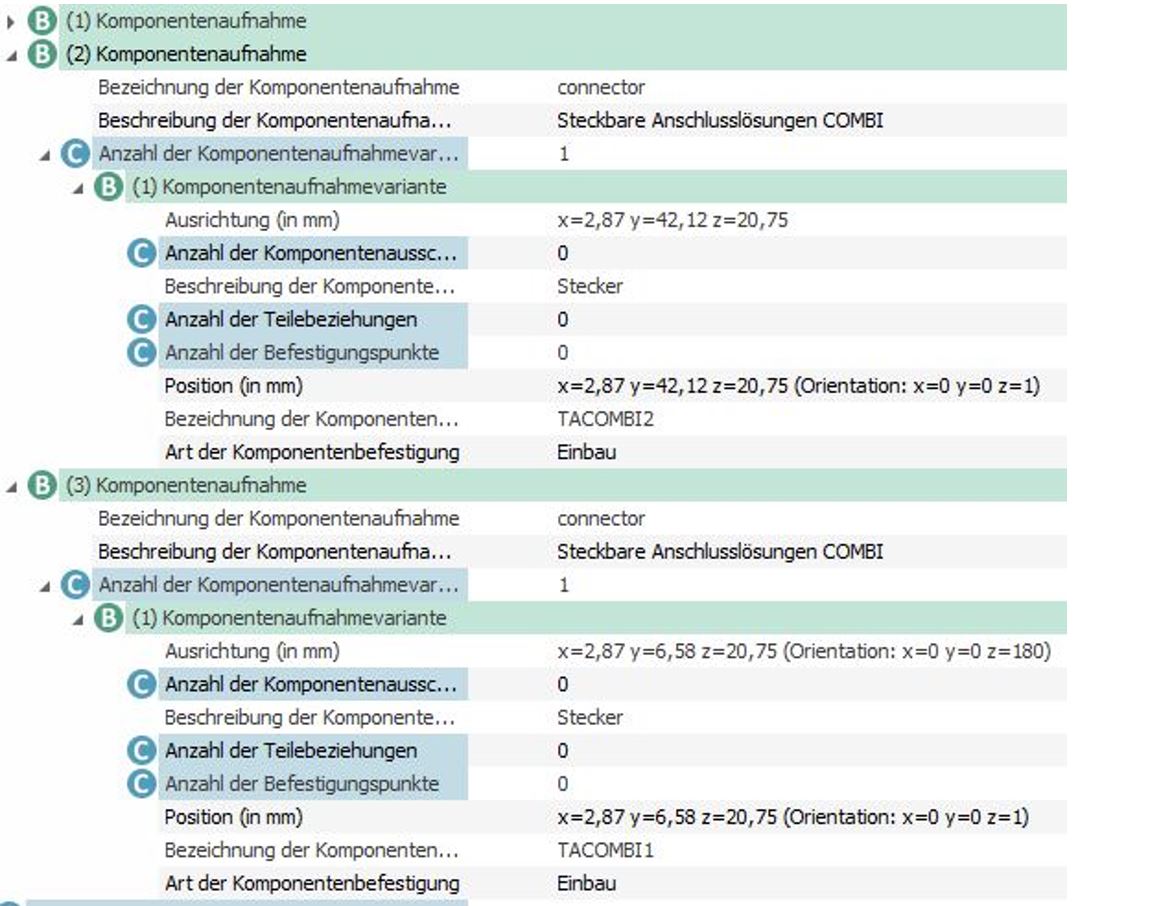
Afin de placer correctement la fiche, en plus des coordonnées où la fiche peut être placée, les informations sont également nécessaires sur la façon dont elle doit être alignée, en fonction de l'emplacement d'installation. A cet effet, deux enregistrements de composants sont décrits sur le terminal. Les données sont affichées dans l'orientation caractéristique de l'image. Dans le premier capteur de composants, le système de coordonnées (ancre cible) est aligné sur le système de coordonnées de référence, de sorte que les valeurs de rotation des axes sont 0. Dans le deuxième capteur de composants, le système de coordonnées (ancre cible) est tourné de 180 ° par rapport à l'axe Z. Pour placer le connecteur sur la pince, le point de référence de montage et l'ancrage cible doivent être placés l'un sur l'autre, puis le système de coordonnées du connecteur est ensuite tourné dans le sens.
Pour placer le connecteur sur la pince, le point de référence de montage et l'ancrage cible doivent être placés l'un sur l'autre, puis le système de coordonnées du connecteur est ensuite tourné dans le sens.

La variante d'acquisition de composants de bloc contient les deux caractéristiques "Alignement-AAN501" et "Position-AAM650". Pour que les données soient utilisées dans les différents systèmes, la règle suivante s’applique : La fonction "Position-AAM650" décrit le point et la direction (vecteur unitaire). Cela permet aux composants d'être placés correctement. La fonction "Alignement AAN-501" décrit le point et la rotation de l'ancrage cible.
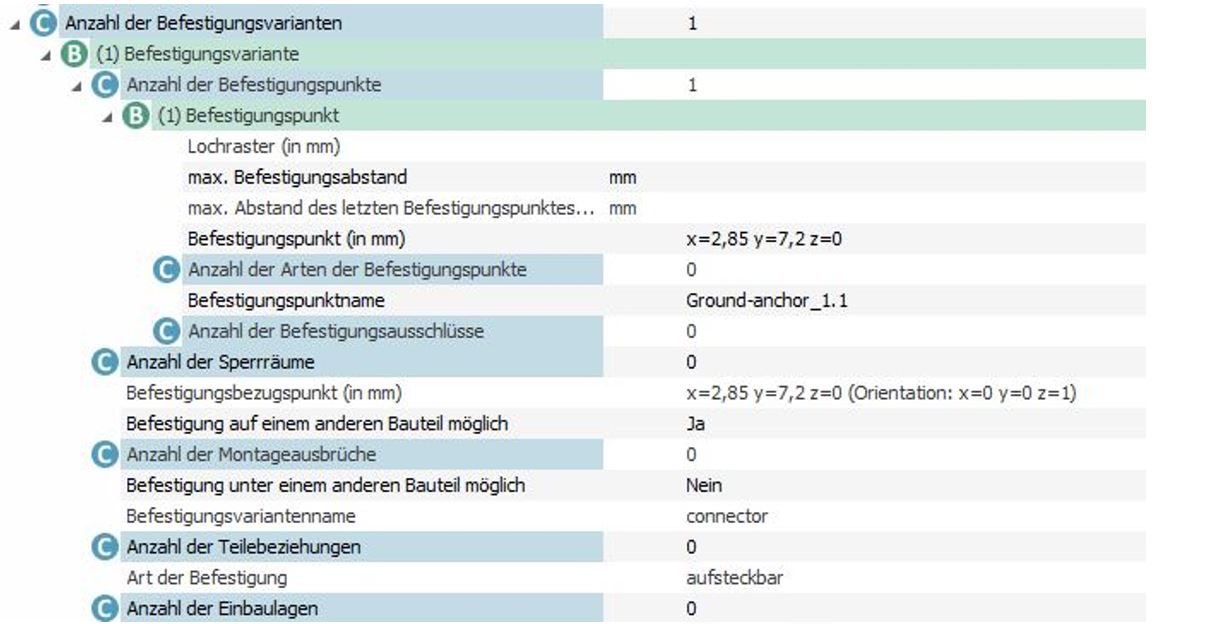
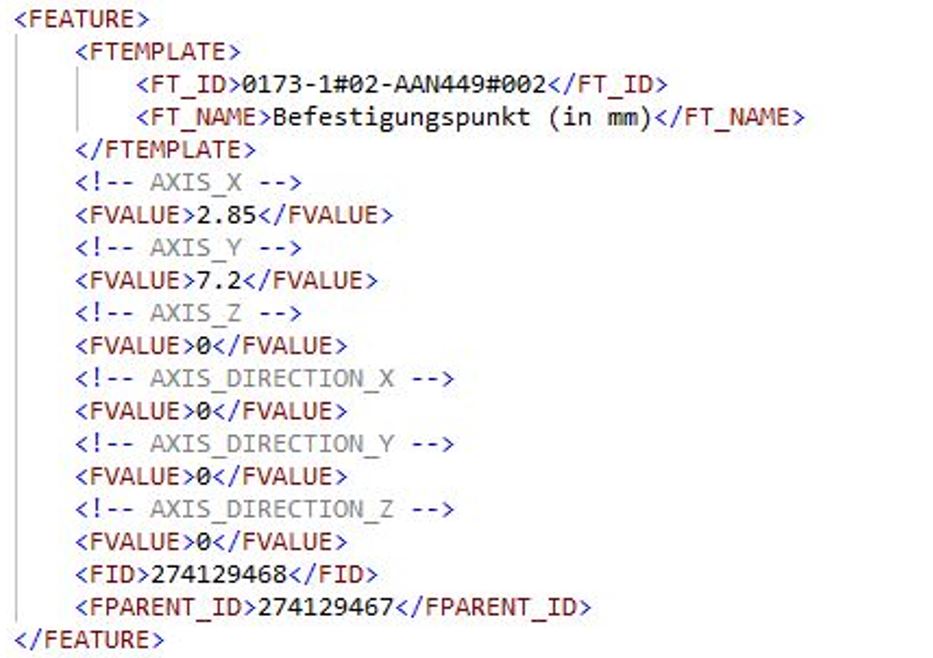
Selon la description d'un enregistrement de composant, la description de la variante de montage est faite sur le composant. La fonction Fixing Reference Point décrit les coordonnées et la direction (vecteur unitaire). Si des informations sur l'ancre de base sont disponibles, elles seront décrites avec la fonction de point d'attache. Étant donné que dans cet exemple l'ancre de base du connecteur est orientée de la même manière que son système de coordonnées de référence, les axes de rotation sont "0". Ainsi, les systèmes cibles peuvent interroger et utiliser les informations correspondantes.